AMS(Autonomous Mobile System)
衛星測位システムの測位精度向上に関する研究
近年,GPSに代表される衛星測位システム(GNSS: Global Navigation Satellite System)が自動運転やロボットのナビゲーションなど広い分野に応用が期待されている.世界各国がそのGNSSの整備を進めており,GNSSには米国のGPSの他に,露国のGLONASS,欧州のGalileo,中国のBeiDou,そして日本のQZSSなどがある.2014年現在,約90機の衛星が地球の上空を周回しており,24時間いつでも,地球上のほぼあらゆる場所で自分の位置を求めることが可能である.今後2020年までに衛星数は約150機まで増える予定であり,GNSS測位の利用性はさらに増すこととなるであろう.このような背景の中,AMS-GNSS班では普及性を重視した,移動体における高精度な測位の実現を目指して日々研究を行っている.GNSS測位単体における精度向上はもちろんであるが,普及性を考えるとあまりにも高価な機器を利用するのでは意味が無い.しかし,安価な受信機では測位における利用性および信頼性に欠けることが多い.そこで,GNSSだけではなく他のセンサも複合させて,最終的な位置推定精度の向上を目指した研究を現在行っている.
小型UAVを用いた地物情報の観測に関する研究
マルチコプターに代表される小型UAVは,人が立ち入ることが困難な地域で運用が可能なことから,大規模地震,津波などの災害現場での上空からの情報収集手段として活用が期待されている.
特に,①迅速な災害初期状況把握のための三次元データ取得,②他のロボットが探索・経路計画などに利用するための環境の高精度三次元地図生成,③災害後に復旧や変位を計測するための上空から詳細な三次元データ取得,等の用途を想定する場合,地上の精密な三次元計測が求められる.
しかし小型UAVはペイロードや電源容量の制限から搭載センサに制約があり,精密な三次元計測は困難とされている.
そこで,本研究室では小型・軽量なGNSSアンテナを小型UAVに搭載し,この小型アンテナを用いた「高精度な位置・姿勢推定手法」「ロバストな測位手法」を開発し,レーザスキャナを用いた小型UAVからの超高精度三次元計測を実現することを目的としている.

無人車両を利用した消防活動のための災害現場情報収集に関する研究
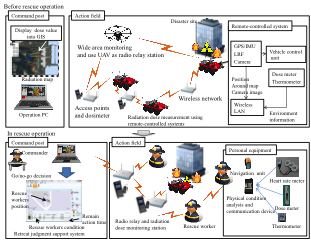
本研究では,2011年に発生した福島第一原発事故時の消防隊員の突入を教訓とし,無人車両を利用した消防活動のための災害現場情報収集システムの開発を行っている.
システムの概要としては,大型の無人車両を災害発生直後に現場に投入し,放射線量や地理情報等の情報収集を行い,その収集した情報を基に消防隊員が最も低いリスクで突入できるルートを生成する.
情報収集をする大型の無人車両には,GPSを代表とする衛星測位システム受信機,レーザスキャナ,カメラ等のセンサを搭載し,それらの情報を複合することにより,車両位置推定,経路計画,車両制御を自律的に行う.
なお,本研究は消防防災科学技術研究推進制度の助成を受け,杏林大学(研究代表)に協力する形で,日本工業大学と共に研究を行っている.

屋内測位に関する研究
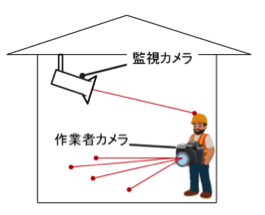
工場などにおいて,機械や作業員の行動を管理する上で,これらの現在位置が必要となることがある.現在自己位置測位で広く用いられているGPSは電波の入らない屋内では使用できない.そこで,屋内で使える高精度な自己位置の測定手法を構築することをめざしている.
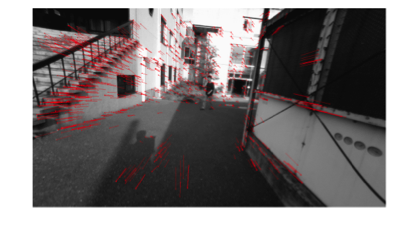
本研究室では測距センサとして比較的安価であるカメラに注目して研究を行っている.
移動する作業員にカメラを取り付け移動中撮影しつづける.撮影した連続する2枚の画像間で抽出される特徴点を追跡し,各特徴点のベクトルを計算するVO(Visual Odometry)と呼ばれる技術を用いてカメラ及びカメラをつけた作業員の移動量を算出する.しかしVOの先行研究ではオドメトリである以上累積誤差が増大することが問題としてあげられている.そこで補正手法として監視カメラを用い,作業員以外の固定された背景と画像上で変移を続ける作業員の差分をとることで,ある固定座標上の作業員の位置を算出する.